
Henrik Bech Jensen
Det er ikke nogen helt tydelig manual der følger med, men med lidt god vilje er det nemt nok at samle framen. Som jeg nævnte i en tidligere atrikel er finishen på framen fin og den behøver ikke at blive slebet på kanterne som nogen har måtte gøre for at der ikke var risiko for at ledninger blev gnavet over. 


Der er gevind i de blå afstandsstykker, så det er dejlig nemt at håndtere inden resten samle. Jeg venter med at sætte bunden på før jeg har samlet noget af elektronikken, da jeg gerne vil have tyngden ind til midten. Jeg er dog lidt skeptisk over for hvor meget støj fartregulatorerne laver, men det finder jeg så ud af på den hårde måde. Nu skal der bare samles.
Her under er "landingsstellet" og pindene til at holde overetagen monteret og powerdistribution boardet er også sat på med nylonskruer og et par gummimuffer til at holde afstand.



Ledningerne til fartregulatorerne føres op i gennem bunden og gennem hullet i powerdistribution boardet og ud til hver sin tilslutning.

Motorer skruet fast. Husk at vælge skruer som netop passer i længden d.s.v. at de kun lige skal gå nogle mm op i motoren og IKKE ramme bevægelige dele i motoren. Der fulgte flere længder med i pakken, så det er ikke noget problem. De motorer der kører med uret har en rød spinner og mod uret en sort.



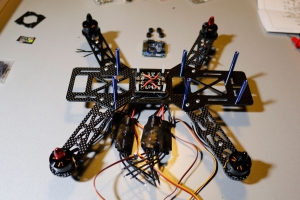
Nu er det høje tid at få bygget en FPVRACER, så jeg bestilte dele til en lille solid sag med carbon frame. Det er i 250'er klassen og jeg har tænkt mig at prøve en FLIP32+ flight controller.
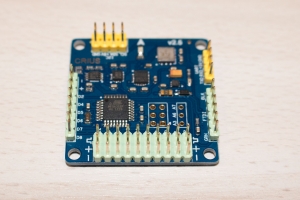
FLIP32+ har magnetometer og barometer som nok er lidt overkill til denne model, men jeg synes det er praktisk alligevel og prisforskellen er så lille at det nærmest ikke kan betale sig at lade være. FLIP32 (uden plus) har ikke de ekstra sensorer.



Jeg har læst en del om at carbondelene på denne frame er meget skarpe og jeg var lidt bekymret for kvaliteten, men jeg synes faktisk at der er meget fint og kanterne er ikke for skarpe. Jeg gør i hvert fald ikke noget ved det for jeg tror ikke der er risiko for at nogle ledninger bliver skåret over.
HUSK AT CARBON LEDER STRØM så der er ikke nogle strømførende dele der må røre og dermed skærmer det også for radiosignaler. Det skal der tages hensyn til ved placering af antenner.

Jeg har fået et par nye modtagere til quadrocopterene og det er D4R-II Til Taranis snederen fra FrSKY. Der er flere kanaler og kontakter og telemetri, som jeg virkelig har manglet. NU kommer det. Se også størrelsessammenligningen på billedet.
Desuden ligner dette bare en 4 kanals modtager, men i PPM mode er der 8 kanaler. DER SKAL DOG SKIFTES FIRMWARE med en pulsbredde på 27 ms før der er plads til fuldt udslag på alle kanaler i signalet.
Denne artikel opdateres snarest med en vejledning til hvordan man gør det, da jeg kan se at det ikke helt er lige til.
OPDATERES og FORTSÆTTES snarest...


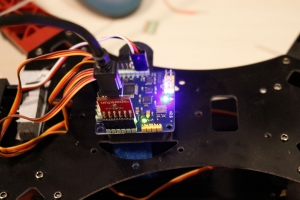
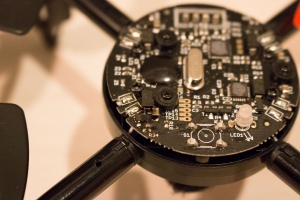
Som jeg beskrev under Elektronikken har jeg nu installeret en ny flightcontroller med alle sennsorer indbygget for at spare lidt ledninger og andre fejlkilder.Her er et lille billede inden bluetooth og GPS er installeret. GPS'en kræver stadig det lilel I2C-NAV modul med egen processor som behandler dataene inden de bruges i flight controlleren. De kommer så via I2C signalet. GPS' en sender serielt.
I config.h skal man lige huske:
#define CRIUS_SE_v2_0
Det er godt nik en v2.5, men den har de samme sensorer og det virker fint

Nu har jeg fløjet med de små externe sensorer og det virker ret godt, men der er mange ledninger og øger risikoen for at der sker fejl, men det er fantastisk at eksperimentere med. Nu lod jeg mig friste af en Crius Multiwii SE v2.5 med stort set de samme sensorer monteret på printet. Jeg vil dog placere et externt kompas på en "pind" for at undgå støj, men jeg vil dog prøve de det indbyggede kompas først.
Jeg splitter min quadrocopter ad og flytter lidt rundt på det hele for også at få elektronikken i sikkerhed i midten af framen. Batteriet kommer så op øverst. Det er dog muligt det giver lidt mere elektrisk støj end nu (derfor skal kompasset ud).
Jeg sparer yderligere et par level convertere væk.
Under software vil jeg komme nærmere ind på opsætningen af flightcontrolleren denne gang. Det har jeg ikke dokumenteret så grundigt endnu.
Den gamle Pro mini kommer så direkte over i et vingefly. Jeg har ikke bestemt om det er et svæve- eller motorfly endnu. Det bliver helt spændende at prøve at konfigurere controlleren til et nyt type fly og lave det gps styret også.
Her er et billede hvor man kan se alle de ledninger og print der bliver sparet væk. Den nye controller ligger uden tilslutninger endnu.


Under en landing lidt langt væk i noget lidt for dybt græs brændte der en mosfet af ved den fartregulator. Der stod lige lidt røg op og da jeg undersøgte printet kunne jeg se at var lidt sort ved den ene mosfet.
Det er lykkedes mig at finde den på nettet, men inden jeg fil den købt faldt jeg over en brugt af samme model som har været kortsluttet (hvad det så end har ødelagt), men jeg håber at kunne bruge en af de mosfets fra den, så min MC-120ér kommer i luften igen. Den brugte ser faktisk meget fin ud i forhold til min egen.
En af de kommende dage finder jeg min lille loddekolbe frem og lodder alle 4 Mosfets af den kortsluttede model og måler dem igennem. Det kunne være sjovt at redde den gamle MC-120'er for sportens skyld og den flyver jo også ret godt.
Her kan man lige se at der er lidt sort på mosfet'en og det lugter meget brændt af en så lille sag.



Jeg vil forbedre min Ground Station ved at gøre den lidt mere mobil. Jeg har to skærme (ikke vist endnu) og et par videobriller - der efterhånden er 15 år gamle!!!, men de virker stadig fint. Dog er opløsningen ikke helt i top i forhold til nye modeller. Det hele skal pakkes i en kuffert eller lignende med et ordentligt batteri, så der er samling på det, for indtil nu har det været lidt besværligt at samle hver gang.
Modtager og sender er også nye med en rækkevidde på over 1km, så det er mere end rigeligt til mine krav. Det gamle gav lidt støj allerede ved 60-70m - det er ikke sjovt ved FPV flyvning.



Bagpå sidder en trackingsensor og hvis jeg får tid vil jeg se om jeg kan skrive et program der styrer pan/tilt kameraet på quadrocopteren med en lille arduino.
Men det skriver jeg mere om når jeg begynder på det. Nu ligger det foreløbigt i TODO bunken og ser godt ud.

I løbet af de næste uger vil jeg skrive mere om opladning og vedligeholdelse af LiPo batterier. Behandler man dem ordentligt kan man få mange flere ladecykler og bedre ydelse i lang tid.
Jeg bruger bl.a. programmet LogView til at overvåge ladeproceduren på en PC. Du kan hente programmet her: http://www.logview.info
Det er lige kommet i en ny STUDIO version som er meget lækker og kan en del mere end det "gamle" bl.a. visualisere GPS data i 3D. Det skal prøves.

Der er en stor database af ladere som genkendes af programmet og det kan vise alt hvad der er værd at vide og måle om ladeprocessen.

Graferne kan slås til og fra og der er mange visningsmuligheder.

Jeg kommer også ind på hvad man kan se af målingerne med forskellige andre instrumenter. Her er det den indre modstand.
Inden længe har jeg mere konkret, efterhånden som jeg får efterårsklargjort batterierne.

Det er praktisk at kunne indstille PID's og overvåge quadrocopteren på sin tablet eller telefon under en fyvetur, så derfor vil jeg have bluetooth forbindelse.
Der er lige et par småting der skal passe sammennu, da jeg har en 5v arduino pro mini som ikke passer med 3.3v som bluetoothmodulet skal have på RX så der skal en lille spændingsdeler på. Det kan bare være 3 ens modstande der deler strømmen og så kan man tage 3.3 v ud efter den anden modstand. TX på modulet til RX på arduinoen behøver ikke ændres da arduinoen kan godt se de nun 3.3v på indgangen.
Nærbilleder kommer straks.

Så er quadrocopteren samlet igen og har været en tur på teststanden. Det viser sig at der er lidt der skal justeres. Fartregulatorerne starter ret stille, men kommer med en pludselig stigning lige der hvor copteren skal lette. Jeg vil kalibrere hver fartregulator igen og se om det hjælper. Men ellers tyder det fint med reaktionen fra styringen. Det bliver godt.
Jeg laver en artikel om indstillingen ad PID, når jeg lige har sat en bluetooth adapter på for ikke hele tiden at skulle passe på ledningerne fra computeren.
Warning: count(): Parameter must be an array or an object that implements Countable in /var/www/onclick.dk/public_quad/templates/jsn_teki_pro/html/com_k2/templates/default/user.php on line 247