
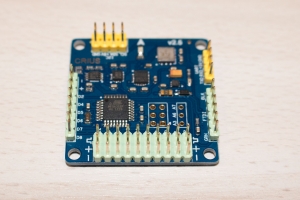
Nu har jeg fløjet med de små externe sensorer og det virker ret godt, men der er mange ledninger og øger risikoen for at der sker fejl, men det er fantastisk at eksperimentere med. Nu lod jeg mig friste af en Crius Multiwii SE v2.5 med stort set de samme sensorer monteret på printet. Jeg vil dog placere et externt kompas på en "pind" for at undgå støj, men jeg vil dog prøve de det indbyggede kompas først.
Jeg splitter min quadrocopter ad og flytter lidt rundt på det hele for også at få elektronikken i sikkerhed i midten af framen. Batteriet kommer så op øverst. Det er dog muligt det giver lidt mere elektrisk støj end nu (derfor skal kompasset ud).
Jeg sparer yderligere et par level convertere væk.
Under software vil jeg komme nærmere ind på opsætningen af flightcontrolleren denne gang. Det har jeg ikke dokumenteret så grundigt endnu.
Den gamle Pro mini kommer så direkte over i et vingefly. Jeg har ikke bestemt om det er et svæve- eller motorfly endnu. Det bliver helt spændende at prøve at konfigurere controlleren til et nyt type fly og lave det gps styret også.
Her er et billede hvor man kan se alle de ledninger og print der bliver sparet væk. Den nye controller ligger uden tilslutninger endnu.


Efter at have samlet elektronikken kastede jeg mig over failsafe funktionen med det samme, da jeg synes det er vigtigt at vide hvad quadrocopteren gør hvis signalet forsvinder eller bliver forstyrret. Det vise dig at det umiddelbart ikke virker korrekt i første omgeng og efter lidt forskning i problemet, kan jeg se at det er fordi jeg bruger de enkelte kanaltilslutninger (PWM) på modtageren og ikke et serielt signal (PPM).
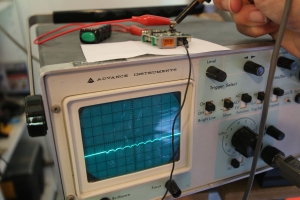
Jeg målte på alle pins på modtageren, en gammel Graupner C17, og fandt et PPM signal på den ubrugte pin på batteristikket, men signalet var ret svagt som det kan ses på billedet her (tryk på billedet for at se en større udgave).

Det måtte kunne løses og jeg åbnede modtageren og fandt det fulde signal på et ben på modtagerchippen. Signalet går kun lige gennem en lille modstand og ud til batteristikket. Jeg cuttede printbanen fra batteristikket og til modstanden og lagde en ledning ditekte til signalet. Det kan ses på billederne her.


Og her kan man nu se at signalet er som det skal være

Demonstration af failsafe der IKKE virker. Her kan man tydeligt se at motorerne - uden propeller endnu - flipper ud når senderen slukkes. Det kan ses på kontrolpanelet på den tilsluttede pc og høres på motorerne i baggrunden.
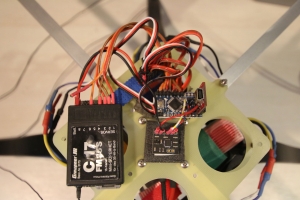
Nu er byggeriet i gang iigen. Arduinoen er forbundet med den gamle modtager med 4 kanaler til styringen og 3 ekstra til indstilling af diverse funktioner. Der er en enkelt ledning jeg ikke har forbundet endnu, men den er klar hvis der bliver brug for den (det er den der hænger lødt over modtageren).
Forbindelsesdiagrammet er sammensat efter de følgende billeder (fundet på nettet). Det første viser forbindelsen til IMU6050'eren (med mulighed for magnetometer som ikke er på quadrocopteren - endnu) og det andet grundprincippet i quadX opsætningen og så har jeg bare brugt IMU6050'eren i stedet for den gamle wii-controller som jo nu er forældet. Jeg laver et bedre diagram senere. Lige nu vil jeg bare have det færdigt så der kan blive fløjet i sommervejret.
Jeg


Her er lidt flere billeder af sagen som den er nu:

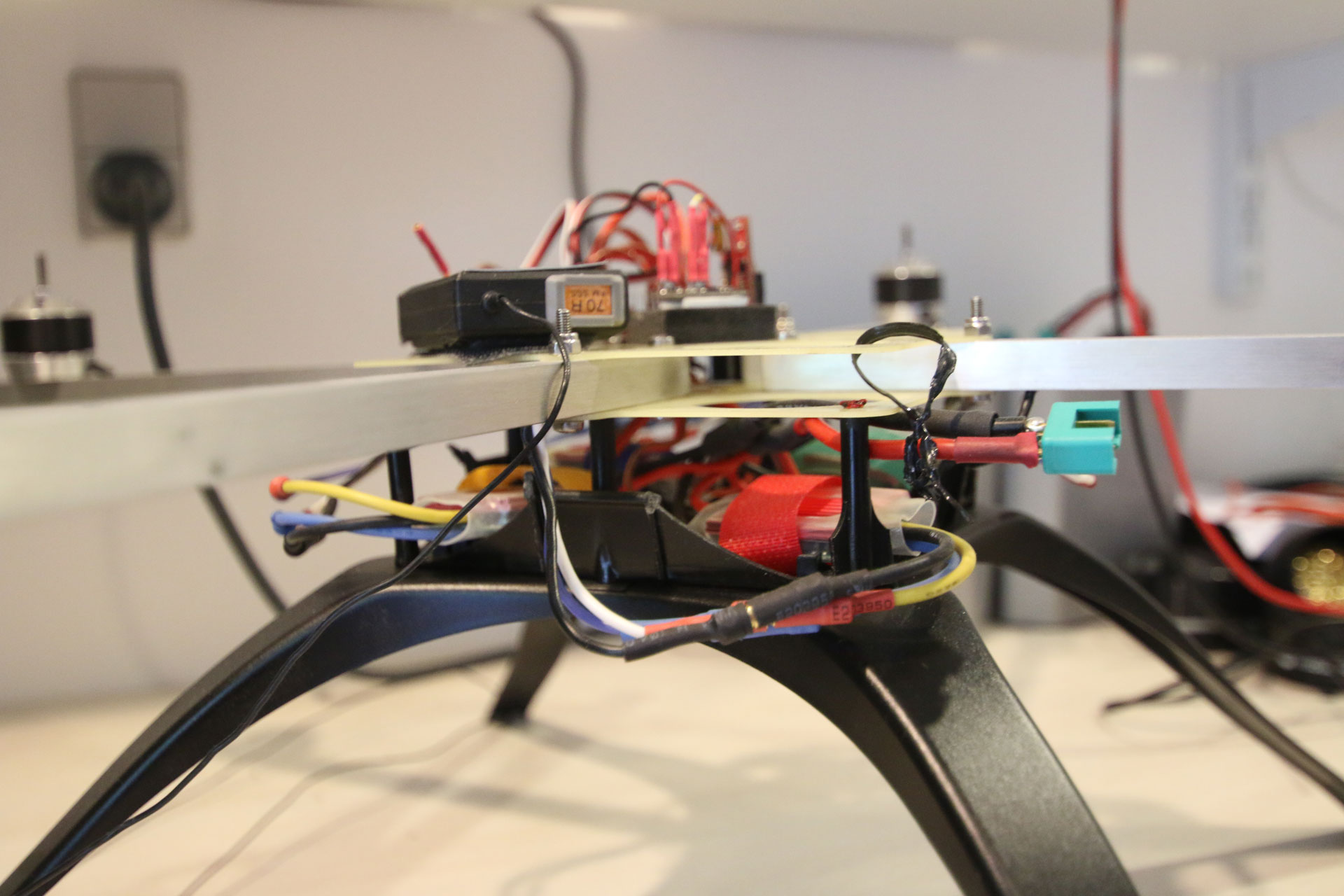


Jeg vælger i første omganag at montere gitteret under framen så det er nemmere at montere benene jeg har. Jeg tror ikke det er den endelige løsning, men det er ok foreløbigt. Det kan ikke helt ses på billedet her over, men fartregulatorerne kan fint ses under glasfiberpladerne.
Modtageren er en der har siddet i et svævefly i 10 år - nu skal den ud i en quadrocopter og alle kanalerne kommer i brug. Det er en 35mHz.
For at det bliver lidt lettere med stik og ledninger laver jeg lige en lille printplade med stik på så der ikke skal klippes og loddes så meget. Det er også for at jeg senere kan bytte rundt på udstyret og afprøve andet ved bare at trække et stik ud og sætte et andet i.
Her under ses den lille opstiling med arduino og IMU 6DOF MPU6050 samt den lille printplade. Det skal nu sættes på framen sammen med modtageren.
 |
 |
Fartregulatorer og mototers ledninger har også fået 3,5 mm stik påloddet.
I de gamle controllere fra wii'en er der alt hvad man skal bruge til at holde en quadrocopter i luften. Det er dog efterhånden lidt forældet i forhold til hvad der nu kan fås på markedet. Jeg skriver dog alligevel lige kort om det, men kommer i løbet af de næste artikler hurtigt til noget mere up-to-date.
Jeg synes bare det lige kunne være sjovt at afprøve teknikken mens jeg venter på der kommer nye sensorer med posten.
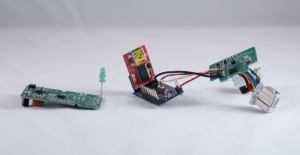
På billedet øverst kan man se en arduino pro mini med indmaden fra en motion + controller. Den indeholder en 3 akset gyro. Ved siden af ligger indmaden fra en nunchuk. Den har en 3-akset accelerometer sensor.
 Efterhånden som der kommer opdateringer til multiwiisoftwaren kommer der af og til ændringer i hardwaren. Her er det f.eks. et par pull up modstande der skal på da de interne ikke bruges i softwaren fra version 2.2. Det er med at være opmærksom på de små ændriner der så skal foretages i opsætningen af softwaren.
Efterhånden som der kommer opdateringer til multiwiisoftwaren kommer der af og til ændringer i hardwaren. Her er det f.eks. et par pull up modstande der skal på da de interne ikke bruges i softwaren fra version 2.2. Det er med at være opmærksom på de små ændriner der så skal foretages i opsætningen af softwaren.
Det kommer jeg tilbage til i en senere artikel.
Brug evt. kommentarer til at spørge om noget du er i tvivl om. Jeg er lidt kortfattet i de første artikler, men vil gerne uddybe hvis nødvendigt.