
Elektronik (6)
Her under finder du artikler om elektronik og moduler som kan bruges på en quadrocopter. GPS, bluetooth signalkomvertering og videoudstyr - og der kommer sikkert mere til.
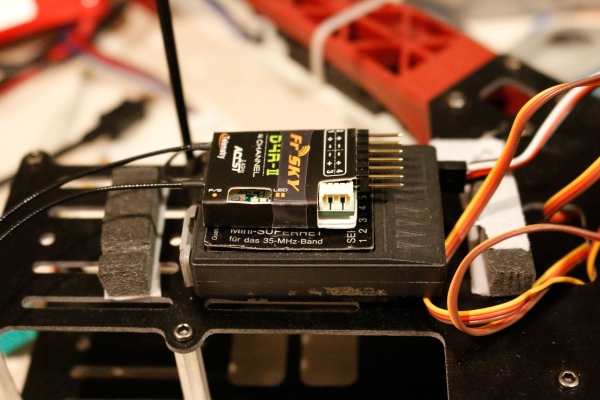
Jeg har fået et par nye modtagere til quadrocopterene og det er D4R-II Til Taranis snederen fra FrSKY. Der er flere kanaler og kontakter og telemetri, som jeg virkelig har manglet. NU kommer det. Se også størrelsessammenligningen på billedet.
Desuden ligner dette bare en 4 kanals modtager, men i PPM mode er der 8 kanaler. DER SKAL DOG SKIFTES FIRMWARE med en pulsbredde på 27 ms før der er plads til fuldt udslag på alle kanaler i signalet.
Denne artikel opdateres snarest med en vejledning til hvordan man gør det, da jeg kan se at det ikke helt er lige til.
OPDATERES og FORTSÆTTES snarest...


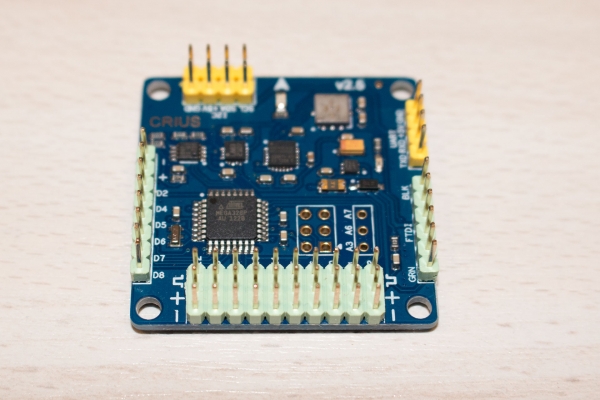
Nu har jeg fløjet med de små externe sensorer og det virker ret godt, men der er mange ledninger og øger risikoen for at der sker fejl, men det er fantastisk at eksperimentere med. Nu lod jeg mig friste af en Crius Multiwii SE v2.5 med stort set de samme sensorer monteret på printet. Jeg vil dog placere et externt kompas på en "pind" for at undgå støj, men jeg vil dog prøve de det indbyggede kompas først.
Jeg splitter min quadrocopter ad og flytter lidt rundt på det hele for også at få elektronikken i sikkerhed i midten af framen. Batteriet kommer så op øverst. Det er dog muligt det giver lidt mere elektrisk støj end nu (derfor skal kompasset ud).
Jeg sparer yderligere et par level convertere væk.
Under software vil jeg komme nærmere ind på opsætningen af flightcontrolleren denne gang. Det har jeg ikke dokumenteret så grundigt endnu.
Den gamle Pro mini kommer så direkte over i et vingefly. Jeg har ikke bestemt om det er et svæve- eller motorfly endnu. Det bliver helt spændende at prøve at konfigurere controlleren til et nyt type fly og lave det gps styret også.
Her er et billede hvor man kan se alle de ledninger og print der bliver sparet væk. Den nye controller ligger uden tilslutninger endnu.



I løbet af de næste uger vil jeg skrive mere om opladning og vedligeholdelse af LiPo batterier. Behandler man dem ordentligt kan man få mange flere ladecykler og bedre ydelse i lang tid.
Jeg bruger bl.a. programmet LogView til at overvåge ladeproceduren på en PC. Du kan hente programmet her: http://www.logview.info
Det er lige kommet i en ny STUDIO version som er meget lækker og kan en del mere end det "gamle" bl.a. visualisere GPS data i 3D. Det skal prøves.

Der er en stor database af ladere som genkendes af programmet og det kan vise alt hvad der er værd at vide og måle om ladeprocessen.

Graferne kan slås til og fra og der er mange visningsmuligheder.

Jeg kommer også ind på hvad man kan se af målingerne med forskellige andre instrumenter. Her er det den indre modstand.
Inden længe har jeg mere konkret, efterhånden som jeg får efterårsklargjort batterierne.
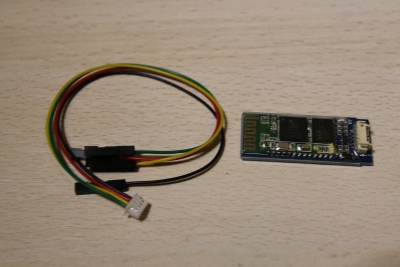
Det er praktisk at kunne indstille PID's og overvåge quadrocopteren på sin tablet eller telefon under en fyvetur, så derfor vil jeg have bluetooth forbindelse.
Der er lige et par småting der skal passe sammennu, da jeg har en 5v arduino pro mini som ikke passer med 3.3v som bluetoothmodulet skal have på RX så der skal en lille spændingsdeler på. Det kan bare være 3 ens modstande der deler strømmen og så kan man tage 3.3 v ud efter den anden modstand. TX på modulet til RX på arduinoen behøver ikke ændres da arduinoen kan godt se de nun 3.3v på indgangen.
Nærbilleder kommer straks.

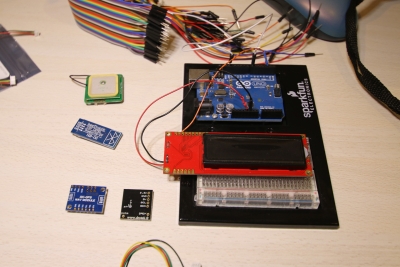
For at GPS modulet kommunikerer med flightcontrolleren skal der uploades ny konfiguration. Det er en UBLOX NEO 6M der her er vist.
for at kunne programmere GPS modules kan man tilslutte en FDTI adapter, men jeg har kun en på 5v som sidder på Auduion ProMini boardet. Den kan dog heldigvis laves om til 3,3v med en lille jumper på bagsiden.

Der efter er der ikke noget at tage fejl af og de 4 ledninger sættes på GPS'en - husk at bytte rx tx.
Link til filer http://code.google.com/p/i2c-gps-nav/downloads/list
og det er "I2C_GPS_NAV_v2.2Beta1-r62.rar" der skal hentes. I den fil er der en konfigurationsfil der hedder "u-blox-config.ublox" og den skal bruges om lidt.
Derefter skal U-CENTER installeres for at uploade konfigurationen og teste GPS modulet http://www.u-blox.com/en/evaluation-software/u-center.html
Sæt Baudraten til default for GPS modulet (min var 38400) og husk at skifte til den rigtige UBLOX generation (min er 6) og connect derefter. Der skulle gerne ske noget efter ret kort tid.
Så kan konfigurationsfilen uploades under TOOLS og GNSS CONFIGURATION. Vælg filen fra før og FILE->UBLOX og ving af i FLASH MEMORY
Efter programmet har kørt lidt meldte det hos mig fejl og efter nærmere undersøgelse viste det sig at GPS'en slår over i 115000baud inden den er helt færdig med at modtage. Efter skift af hastighed og upload igen i den nye hastighed virkede alt som det skulle.
På billedet kan man se der er forbindelse. Satelitterne er svage, men der er forbindelse selv om det er indendørs.

Jeg har oprettet denne menu for at adskille elektronikken lidt fra bygningen af quadrocopteren. Det gør det nok lidt lettete at finde rundt i.
Jeg har en del moduler liggende som jeg efterhånden skal have monteret på quadrocopteren og vil skrive lidt om de enkelte moduler og uddybe hvai jeg finder noget man skal være opmærksom på.
Som jeg andre steder på siden skriver, er det ikke en manual til hvordan man gør det hele fra bunden, men mere hvis jeg selv synes der er noget der er sværere at finde oplysninger om eller faldgruber. Jeg har desværre ikke tid til at lave en fuld beskrivelse af alt, selv om jeg MEGET gerne ville.
Warning: count(): Parameter must be an array or an object that implements Countable in /var/www/onclick.dk/public_quad/templates/jsn_teki_pro/html/com_k2/templates/default/category.php on line 242