
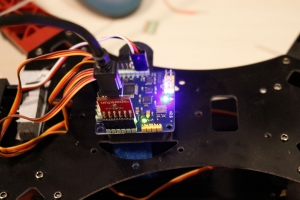
Som jeg beskrev under Elektronikken har jeg nu installeret en ny flightcontroller med alle sennsorer indbygget for at spare lidt ledninger og andre fejlkilder.Her er et lille billede inden bluetooth og GPS er installeret. GPS'en kræver stadig det lilel I2C-NAV modul med egen processor som behandler dataene inden de bruges i flight controlleren. De kommer så via I2C signalet. GPS' en sender serielt.
I config.h skal man lige huske:
#define CRIUS_SE_v2_0
Det er godt nik en v2.5, men den har de samme sensorer og det virker fint

Udgivet i : Quadrocopter