
Efter at have samlet elektronikken kastede jeg mig over failsafe funktionen med det samme, da jeg synes det er vigtigt at vide hvad quadrocopteren gør hvis signalet forsvinder eller bliver forstyrret. Det vise dig at det umiddelbart ikke virker korrekt i første omgeng og efter lidt forskning i problemet, kan jeg se at det er fordi jeg bruger de enkelte kanaltilslutninger (PWM) på modtageren og ikke et serielt signal (PPM).
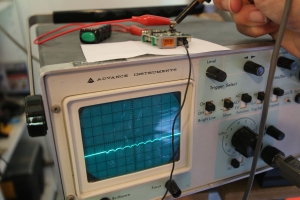
Jeg målte på alle pins på modtageren, en gammel Graupner C17, og fandt et PPM signal på den ubrugte pin på batteristikket, men signalet var ret svagt som det kan ses på billedet her (tryk på billedet for at se en større udgave).

Det måtte kunne løses og jeg åbnede modtageren og fandt det fulde signal på et ben på modtagerchippen. Signalet går kun lige gennem en lille modstand og ud til batteristikket. Jeg cuttede printbanen fra batteristikket og til modstanden og lagde en ledning ditekte til signalet. Det kan ses på billederne her.


Og her kan man nu se at signalet er som det skal være

Demonstration af failsafe der IKKE virker. Her kan man tydeligt se at motorerne - uden propeller endnu - flipper ud når senderen slukkes. Det kan ses på kontrolpanelet på den tilsluttede pc og høres på motorerne i baggrunden.