
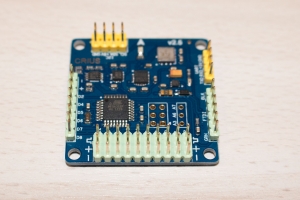
Nu har jeg fløjet med de små externe sensorer og det virker ret godt, men der er mange ledninger og øger risikoen for at der sker fejl, men det er fantastisk at eksperimentere med. Nu lod jeg mig friste af en Crius Multiwii SE v2.5 med stort set de samme sensorer monteret på printet. Jeg vil dog placere et externt kompas på en "pind" for at undgå støj, men jeg vil dog prøve de det indbyggede kompas først.
Jeg splitter min quadrocopter ad og flytter lidt rundt på det hele for også at få elektronikken i sikkerhed i midten af framen. Batteriet kommer så op øverst. Det er dog muligt det giver lidt mere elektrisk støj end nu (derfor skal kompasset ud).
Jeg sparer yderligere et par level convertere væk.
Under software vil jeg komme nærmere ind på opsætningen af flightcontrolleren denne gang. Det har jeg ikke dokumenteret så grundigt endnu.
Den gamle Pro mini kommer så direkte over i et vingefly. Jeg har ikke bestemt om det er et svæve- eller motorfly endnu. Det bliver helt spændende at prøve at konfigurere controlleren til et nyt type fly og lave det gps styret også.
Her er et billede hvor man kan se alle de ledninger og print der bliver sparet væk. Den nye controller ligger uden tilslutninger endnu.



Det er praktisk at kunne indstille PID's og overvåge quadrocopteren på sin tablet eller telefon under en fyvetur, så derfor vil jeg have bluetooth forbindelse.
Der er lige et par småting der skal passe sammennu, da jeg har en 5v arduino pro mini som ikke passer med 3.3v som bluetoothmodulet skal have på RX så der skal en lille spændingsdeler på. Det kan bare være 3 ens modstande der deler strømmen og så kan man tage 3.3 v ud efter den anden modstand. TX på modulet til RX på arduinoen behøver ikke ændres da arduinoen kan godt se de nun 3.3v på indgangen.
Nærbilleder kommer straks.