
Henrik Bech Jensen

Her er to pan/tilt camera mounts som jeg har købt via hobbyking. Det er både den lille og store udgave. De koster ikke mere end et par dollar pr stk. De skal afprøves på diverse flyvere og quadrocopteren.
Der kommer mere senere.

Det er et lille let og fikst kamera fra e-flite, som jeg faldt over i Flensborg. Man kan optage billede eller video og der er en tilslutnig til modtageren, så man kan styre det fra sin fjernstyring. Man kan dog ikke skifte mode på den måde. Det skal afgøres inden man flyver. Linsen kan vippes lidt og der sidder et Micro-SD kort i.
Et lille minus er at når man skal aktivere optagelsen fra fjernstyringen skal man helst have en trykknap der selv hopper ud igen, da det kæver en puls af kort varighed for at det virker. Jeg har en vippekontakt som jeg håbede jeg skulle skubbe til den ene side når der skal filmes og tilbage igen ved stop, men jeg skal vippe frem og tilbage hver gang og håbe på impulsen var kort nok. Det efterlader en med lidt usikkerhed om det nu filmer eller ikke. Ved billeder kan man bare vippe et par gange med kontakten, så er der jo nok taget et billede.
Her er et par billeder og en film som viser kvaliteten. Ikke just i top, men det kan da bruges til lidt sjov. Det kunne se ud til at kompressionen er dårlig. Jeg har dog været ude for at der fejl i streamen så ca 100 linier fra bunden af billedet kommer i toppen i stedet for.
Men der er billigt (40 euro) og kan bruges til lidt sjove ting, f.eks. lidt stuntflyvning (for farligt til gopro) eller overvåge dele på flyet/quadrocopteren.
Efter at have samlet elektronikken kastede jeg mig over failsafe funktionen med det samme, da jeg synes det er vigtigt at vide hvad quadrocopteren gør hvis signalet forsvinder eller bliver forstyrret. Det vise dig at det umiddelbart ikke virker korrekt i første omgeng og efter lidt forskning i problemet, kan jeg se at det er fordi jeg bruger de enkelte kanaltilslutninger (PWM) på modtageren og ikke et serielt signal (PPM).
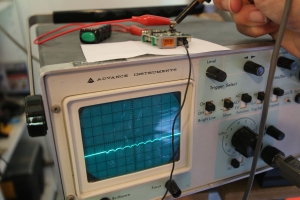
Jeg målte på alle pins på modtageren, en gammel Graupner C17, og fandt et PPM signal på den ubrugte pin på batteristikket, men signalet var ret svagt som det kan ses på billedet her (tryk på billedet for at se en større udgave).

Det måtte kunne løses og jeg åbnede modtageren og fandt det fulde signal på et ben på modtagerchippen. Signalet går kun lige gennem en lille modstand og ud til batteristikket. Jeg cuttede printbanen fra batteristikket og til modstanden og lagde en ledning ditekte til signalet. Det kan ses på billederne her.


Og her kan man nu se at signalet er som det skal være

Demonstration af failsafe der IKKE virker. Her kan man tydeligt se at motorerne - uden propeller endnu - flipper ud når senderen slukkes. Det kan ses på kontrolpanelet på den tilsluttede pc og høres på motorerne i baggrunden.
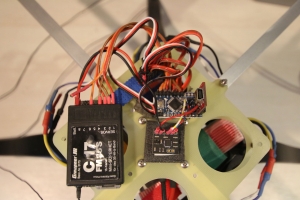
Nu er byggeriet i gang iigen. Arduinoen er forbundet med den gamle modtager med 4 kanaler til styringen og 3 ekstra til indstilling af diverse funktioner. Der er en enkelt ledning jeg ikke har forbundet endnu, men den er klar hvis der bliver brug for den (det er den der hænger lødt over modtageren).
Forbindelsesdiagrammet er sammensat efter de følgende billeder (fundet på nettet). Det første viser forbindelsen til IMU6050'eren (med mulighed for magnetometer som ikke er på quadrocopteren - endnu) og det andet grundprincippet i quadX opsætningen og så har jeg bare brugt IMU6050'eren i stedet for den gamle wii-controller som jo nu er forældet. Jeg laver et bedre diagram senere. Lige nu vil jeg bare have det færdigt så der kan blive fløjet i sommervejret.
Jeg


Her er lidt flere billeder af sagen som den er nu:


Multiwii softwaren er et opensource projekt og har eksisteret i nogle år efterhånden. Det er meget udviklet og der kommer en masse ekstra ting til det f.eks. styeing af parametre og overvågnng af status på mobilen eller tablet. Der er understøttelse af GPS og meget mere.
Det kan downloades her: http://code.google.com/p/multiwii/downloads/list
I det følgende vil jeg skrive om installationen og de ændringer der skal til for at få en quadrocopter i luften.
Hent også arduinosoftwaren her: http://arduino.cc/en/Main/Software og den nyeste Arduino 1.5.8 BETA virker fint til den pro mini jeg bruger.

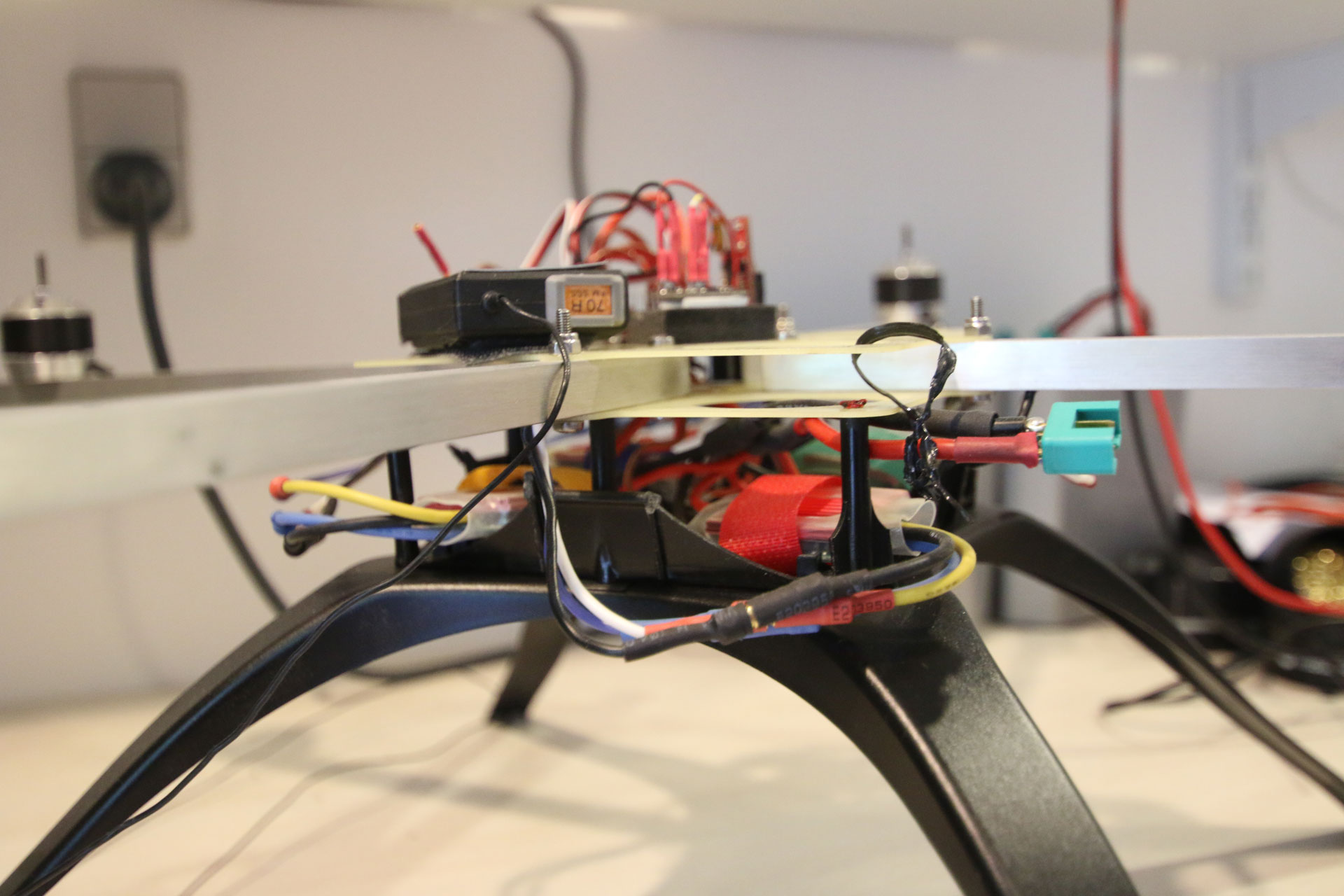
Jeg vælger i første omganag at montere gitteret under framen så det er nemmere at montere benene jeg har. Jeg tror ikke det er den endelige løsning, men det er ok foreløbigt. Det kan ikke helt ses på billedet her over, men fartregulatorerne kan fint ses under glasfiberpladerne.
Modtageren er en der har siddet i et svævefly i 10 år - nu skal den ud i en quadrocopter og alle kanalerne kommer i brug. Det er en 35mHz.
For at det bliver lidt lettere med stik og ledninger laver jeg lige en lille printplade med stik på så der ikke skal klippes og loddes så meget. Det er også for at jeg senere kan bytte rundt på udstyret og afprøve andet ved bare at trække et stik ud og sætte et andet i.
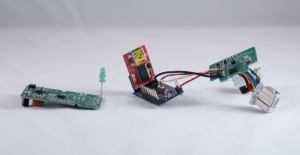
Her under ses den lille opstiling med arduino og IMU 6DOF MPU6050 samt den lille printplade. Det skal nu sættes på framen sammen med modtageren.
 |
 |
Fartregulatorer og mototers ledninger har også fået 3,5 mm stik påloddet.

De (efterhånden) gamle fartregulatorer som jeg købte for et par år siden kan nu bruges til noget fornuftigt. Egentlig er det bedst at sætte dem til ikke at slå fra ved en vis spænding, men den mulighed tilbyder de ikke. Det er faktisk de mest skrabede jeg kan forestille mig, så det bliver interessant at sætte dem til når nu elektronikken bliver klar, men det er oplagt at skifte dem næste gang jeg frekventerer en hobbybutik. For at få quadrocopteren til at flyve bedst muligt er det vigtigt at fartregulatorene er hurtige og kan klare de frekvenser signalerne kommer i fra arduinoen. 400kHz er fint. Men dem jeg sætter på nu er langsommere. Men som nævnt tidligere er dette en quadrocopter jeg prøver at bygge med materialer jeg har på hylderne.
På det øverste billede ses hvordan jeg har valgt at lodde dem sammen. Alle 4 plusledninger loddes sammen og der indsættes en ledning op til stikket. Det samme med minus. Jeg holder lige ledningerne sammen med lidt ståltråd for at det er nemmere at holde styr på dem under lodningen. Derefter en smule krympeflex. Det optimale er jo n prof powersamling man kan købe, men igen - det er jo prototypen og det virker.
 |
 |
I de gamle controllere fra wii'en er der alt hvad man skal bruge til at holde en quadrocopter i luften. Det er dog efterhånden lidt forældet i forhold til hvad der nu kan fås på markedet. Jeg skriver dog alligevel lige kort om det, men kommer i løbet af de næste artikler hurtigt til noget mere up-to-date.
Jeg synes bare det lige kunne være sjovt at afprøve teknikken mens jeg venter på der kommer nye sensorer med posten.
På billedet øverst kan man se en arduino pro mini med indmaden fra en motion + controller. Den indeholder en 3 akset gyro. Ved siden af ligger indmaden fra en nunchuk. Den har en 3-akset accelerometer sensor.
 Efterhånden som der kommer opdateringer til multiwiisoftwaren kommer der af og til ændringer i hardwaren. Her er det f.eks. et par pull up modstande der skal på da de interne ikke bruges i softwaren fra version 2.2. Det er med at være opmærksom på de små ændriner der så skal foretages i opsætningen af softwaren.
Efterhånden som der kommer opdateringer til multiwiisoftwaren kommer der af og til ændringer i hardwaren. Her er det f.eks. et par pull up modstande der skal på da de interne ikke bruges i softwaren fra version 2.2. Det er med at være opmærksom på de små ændriner der så skal foretages i opsætningen af softwaren.
Det kommer jeg tilbage til i en senere artikel.
Brug evt. kommentarer til at spørge om noget du er i tvivl om. Jeg er lidt kortfattet i de første artikler, men vil gerne uddybe hvis nødvendigt.
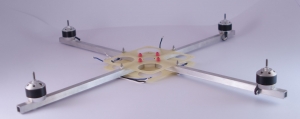
Den gamle frame jeg købte i conrad i Berlin har ligget på hylden længe, men er nu klar med påmonterede motorer. Den kan forresten stadig købes her, men der er jo kommet mange bedre siden da. Men denne quadrocopter kan også bare bruges til test af teknikken for derefter at bygge en toptunet udgave.
Motorerne er de gamle fra min 3 år gamle quadrocopter 450'er fra Conrad også. De er i fin stand selv efter et par styrt med den gamle. Den er på 1020kV. Du kan læse mere her om motoren.
Det er lige pludseligt blevet tid til at opdatere siden igen. Jeg er desværre langt bagefter. Når jeg har siddet på værkstedet har jeg taget en masse billeder af det jeg har lavet (octocopter og fpv-racere) og Inden for de næste dage kommer der artikler om flere nye modeller, som jeg har lavet og fløjet med i mellemtiden og nogle jeg bare har testet. Jeg skal forsøge at lave en del tekst også, men i første omgang bliver det lidt gallerilignende og senere kommer der tekst på. Der har været en del arbejde at se til og ikke så meget tid til at lave denne hjemmeside. Dette er skrevet d. 6-6-17.
Samtidigt går jeg over til et nyt system at lave artiklerne i, så de nye artikler ændrer lidt karakter. Jeg konverterer de gamle artikler senere.
SENESTE NYT:
Octocopter, GEP210 og 90GT under byggeprojekter
Hvis du er bidt af quadrocopterdillen er du kommet til den rigtige side. Her kan du finde en masse om hard- og software til quadrocoptere.
Det har været vinter og der er sket lidt nyt som jed vil samle op på i disse dage. Den nye flightcontroller er monteret og testet. Jeg vil også skifte radioen ud med en Taranis X9D plus med telemetri og jeg vil samle en quadracer på en Night Hawk 250 frame så der kan flyves fpvrace. Det kommer der en masse om for det bliver den nye dille.
Min ground station er også opdateret lidt og det kommer der snart mere om
BYGNING AF QUADROCOPTER
Under dette punkt finder du beskrivelser af de ting jeg bygger. Her beskriver jeg i korte træk det der skal til for at man kan bygge sin egen quadrocopter. Det er meningen, at jeg vil teste flere forskellige typer flightcontrollere for at finde den bedste til at flyve FPV med - og samtidig er nem at bygge selv og har mulighed for modificering af i softwaren. Der er mange sider med instruktioner til selvbyg på nettet og jeg vil undgå at gentage alt hvad man nemt kan finde andre steder på nettet, men prøve at uddybe der hvor jeg synes der mangler information. Skriv hvis du mangler info, så skal jeg gerne finde noget frem der kan hjælpe dig videre i dit projekt.


SOFTWARE Her kommer links og beskrivelser af den software jeg bruger til indstilling af flightcontrollere og til groundstations m.m.
ELEKTRONIKKEN Erfaringer med moduler og andet elektronik.
TEST Jeg flyver også med små RTF quadrocoptere som træning og vil skrive lidt om min erfaring med de enkelte modeller.
TODO Når jeg kommer i en hobbyforretning - gerne i Tyskland - så skal jeg altid have noget med hjem og det ligger så i en ventebunke. Det kan også være ting der er bestilt hos Hobbyking o.s.v. Ofte er det til quadrocopteren.
HANGAREN Her er en oversigt over de modeller jeg de sidste 15 år har købt og fløjet med ud over quadrocoptere.
Warning: count(): Parameter must be an array or an object that implements Countable in /var/www/onclick.dk/public_quad/templates/jsn_teki_pro/html/com_k2/templates/default/user.php on line 247